Well, Christmas has come and gone, and I scored a bunch of stuff to feed my RC Planes habit:
- Keychain FOB Form Factor Camera – Perfect for shooting aerial footage
- A Bunch of servos
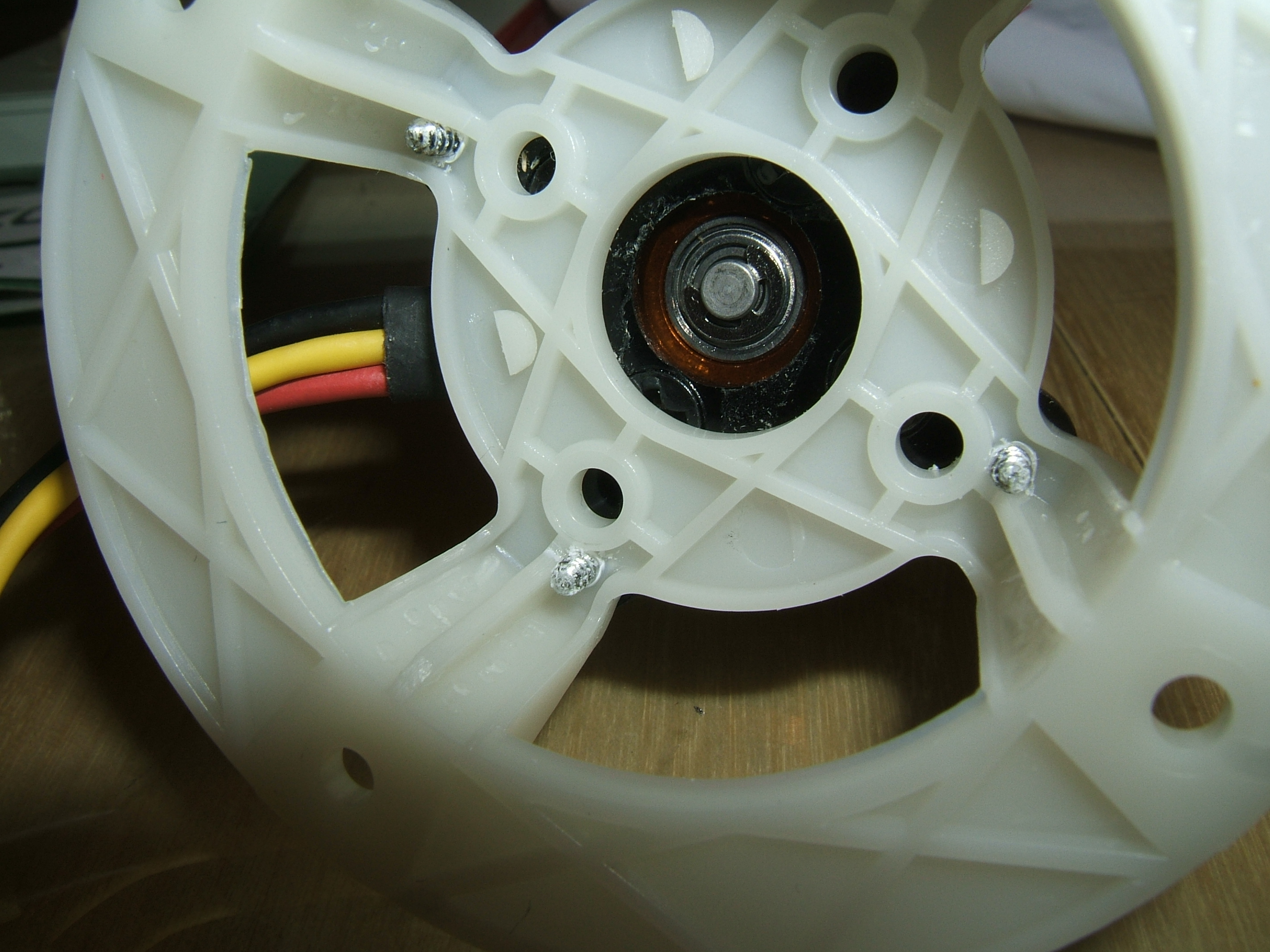
- Brushless Motor and Speed Control (GH2212-13 Motor)
- Little Flashlights For Night Flight
- El Cheap-O 6 Channel Radio System
So, now I have all the guts that an RC Plane needs, but I had no airframe to stick it all in. So, a few days after Christmas I headed to my local hobby shop and picked up a GWS Tiger Moth 400 model kit:

Why did I pick this particular model? Well, first of all, it was in my price range (aka cheap) and secondly it looked to be enough of a challenge to keep my interest, but also be a heck of a lot of fun to fly. Also, this is my first 4 channel plane, so I wanted to choose something that would be a relatively slow flyer.
Building it took a lot longer than I was expecting, and the instructions have a few errors in them – there are 2 I will point out: It has an incorrect measurement for cutting the guide tubing for the push/pull rods that run from the electronics compartment to the rear of the plane. Secondly, the plane comes with a bunch of different sizes of some of the parts – in particular, the retaining bracket that holds in the landing gear wire is one I fouled up. The instructions said to put in part C10, so I grabbed the first C10 I found and glued it in. Many steps later, the instructions finally get around to putting the landing gear wire into the bracket you glued long ago. Mine didn’t fit. I dug through the parts I had left and found several other brackets, also marked C10, with different sizes to accommodate different landing gears. Watch for this.
Other than some other minor issues with trying to follow the instructions, the build went well. There are 2 modifications I made to this plane right from the start: I did not install the stock wheels, instead choosing some ultra-light foamies that will work better in the field where I fly. Secondly, I did not mess with the supplied motor and gearing for the prop – instead I installed my new brushless motor listed above. This required a bit of creative mounting for the motor, but the results look great and hopefully will fly just as well.
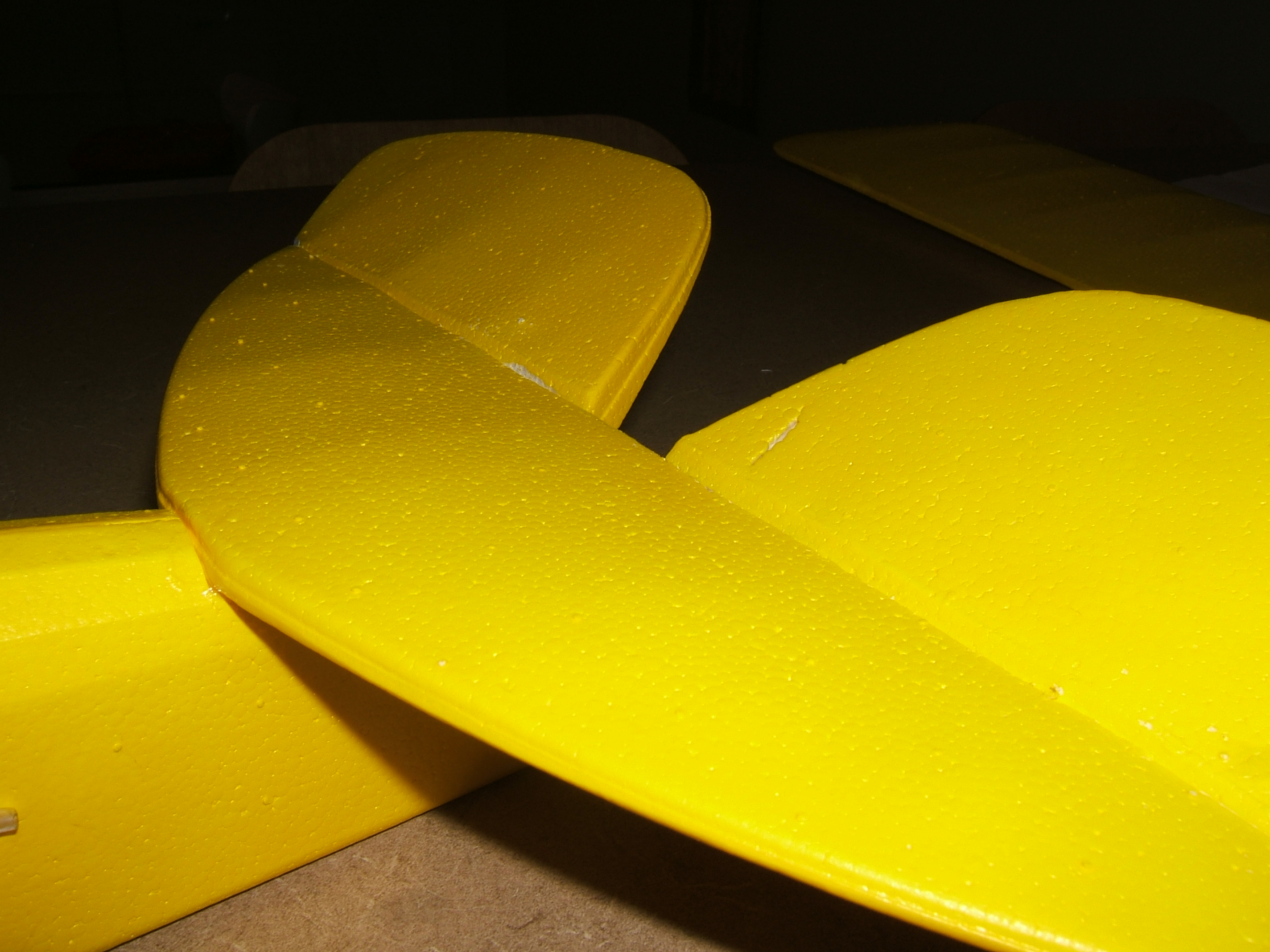
Some pictures of the build process and finished plane:





















I’ve checked the center of gravity, and I’ve done some glide tests with it to make sure I won’t have any nasty surprises in the air the first time I fly it. With this brushless power system running off of my SuperCub’s 9.6v NiMh battery pack, this plane will hover perfectly vertical. As soon as I can get some 12v LiPo batteries, I ought to have a nearly unlimited vertical climb. 🙂
I’ve also attached my new video camera to the top of the top wing, and have just been waiting for the weather to cooperate so I can take it out for a maiden flight. The weather man promises that tomorrow looks like the day, so stay tuned for an update soon.
Leave a Reply